Spatiotemporal Feature-Encoded Navigation for USVs in Unpredictable Maritime Scenarios
submit for IEEE Internet of Things Journal (IoT).
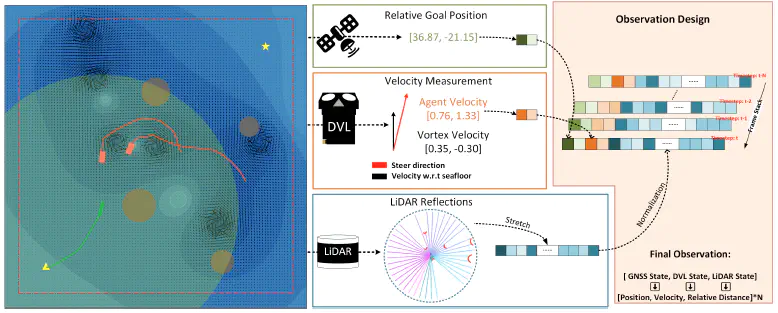 Image credit: Unsplash
Image credit: Unsplash
The paper proposes a robust collision avoidance framework for USVs navigating high-risk maritime environments without prior assumptions about surrounding obstacles. Current research typically assumes that known static obstacles and dynamic obstacles move in simplified patterns, failing to account for real-world conditions where human-operated vessels exhibit unpredictable and high-dynamic behaviors. To address this, we develop an innovative spatiotemporal feature-encoded navigation policy built on the implicit quantile network. The policy’s input is constructed using a sensor-based observation that integrates multiple sensors for environmental data collection, enabling a highly responsive and end-to-end navigation solution. Additionally, by employing convolutional neural networks (CNNs) to extract spatial features and utilizing a continuous-time closedform network to capture long-term motion dependencies, the proposed method effectively distinguishes between static and dynamic obstacles. The algorithm is compared with one reinforcement learning-based method and three classical methods. The results demonstrate its superior performance in navigating USVs through congested scenarios involving varying ocean flows, aggressive vessels, and static barriers.
Wei Zhu
Assistant Professor
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.