Local Collision Avoidance for Unmanned Surface Vehicles based on an End-to-End Planner with a LiDAR Beam Map
submit for IEEE Transactions on Intelligent Transportation Systems (TITS).
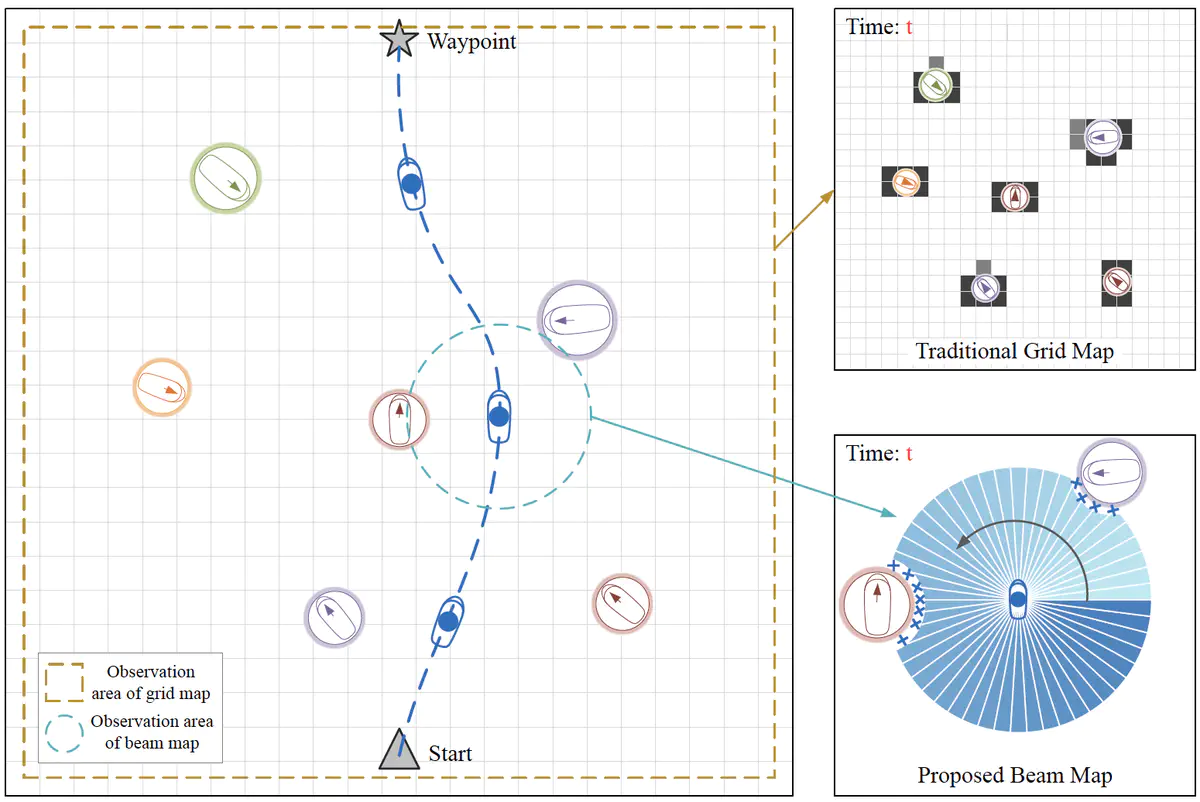 Image credit: Unsplash
Image credit: Unsplash
Collision avoidance capability ensures the safe navigation of unmanned surface vehicles (USVs). This paper presents an end-to-end approach to local collision prevention in water surface environments, with an emphasis on augmenting the evasion of obstacles and the smoothness of navigation paths. The deep reinforcement learning (DRL) method is leveraged to directly project relative distance states into autonomous actions without cumbersome map maintenance. We introduce a novel observation modality known as a beam map, which precisely pinpoints obstacles in all directions. This new input modality, functioning in harmony with range sensors, imitates the operation of an on-board LiDAR system. Unlike prior methodologies that rely on discrete action spaces, our research utilizes a continuous action space that enables smoother paths and nuanced maneuvers. Additionally, warning zone and discomfort angle have been incorporated to allocate ample time and space for motion decision-making, promoting effective collision avoidance. Experiments, in comparison with advanced RL techniques and traditional navigation methods, demonstrate that our algorithm exhibits remarkable capability for obstacle avoidance and robust adaptability to environmental changes. With real inland ships navigation data, four steering situations have been designed to further confirm the efficacy of the proposed method.
Wei Zhu
Postdoc
My research interests include deep reinforcement learning, snake robots, wheeled bipedal robots, robotic arms, quadruped robots, humanoid robots, and social navigation.